Advanced Sky and Space Technologies
A global vision to better analyze and act


Earth observation services
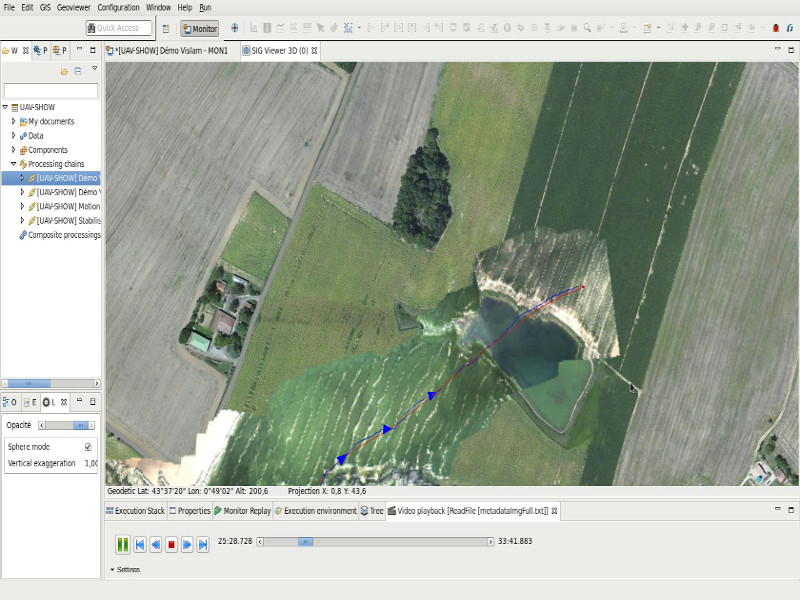
The emergence of user services for earth observation is one of our major development axes within the framework of Copernic (ex-GMES) and within the broader framework of “integrated applications”. These observation services allow the creation of imagery and analysis based on geospatial data.
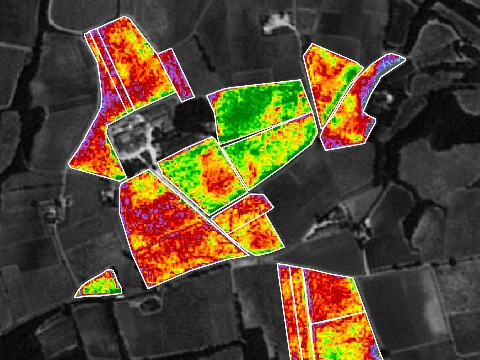
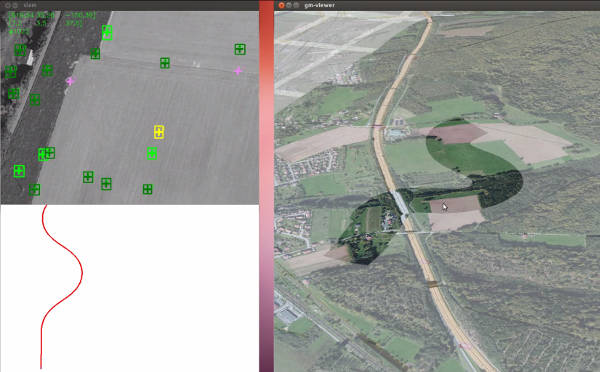
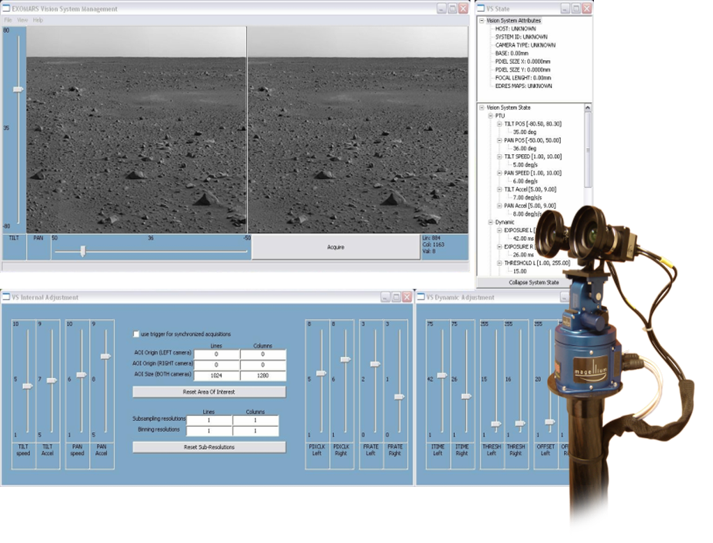
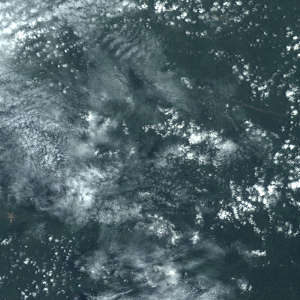
We have recognised expertise in geometric modelling of sensors, which is essential for image projection and ortho-rectified image generation. Our experience in image processing ranges from SAR imaging to high-resolution optical imaging. We offer powerful technical solutions: shape recognition, cloud detection, radiative transfer modelling, image compression, image co-location…
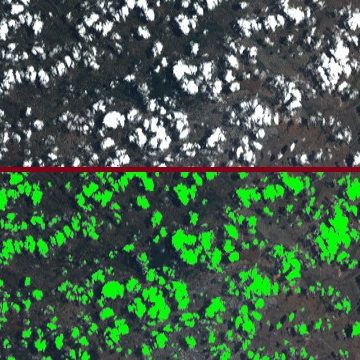
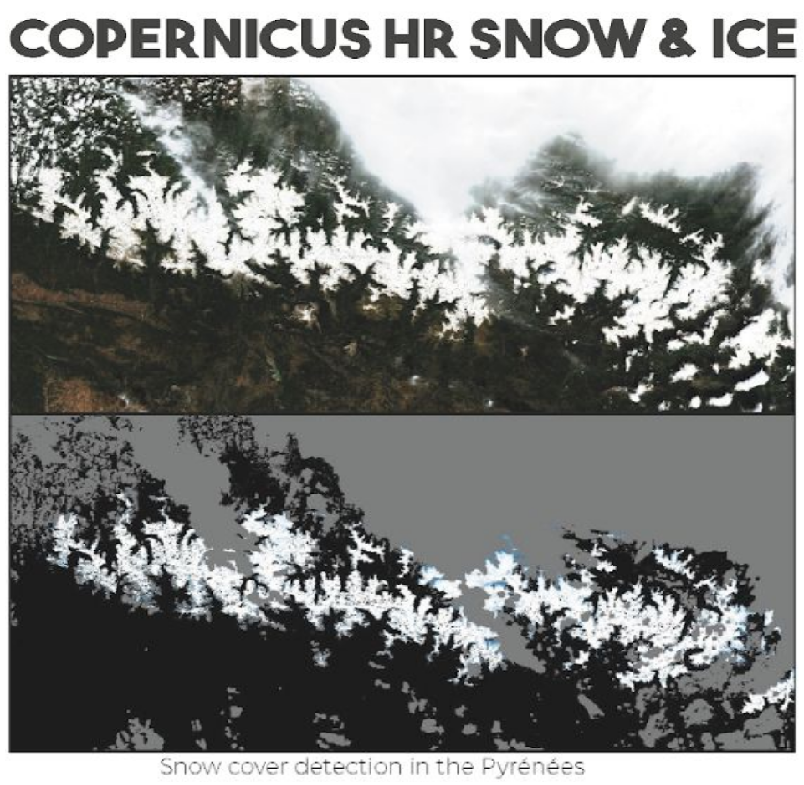
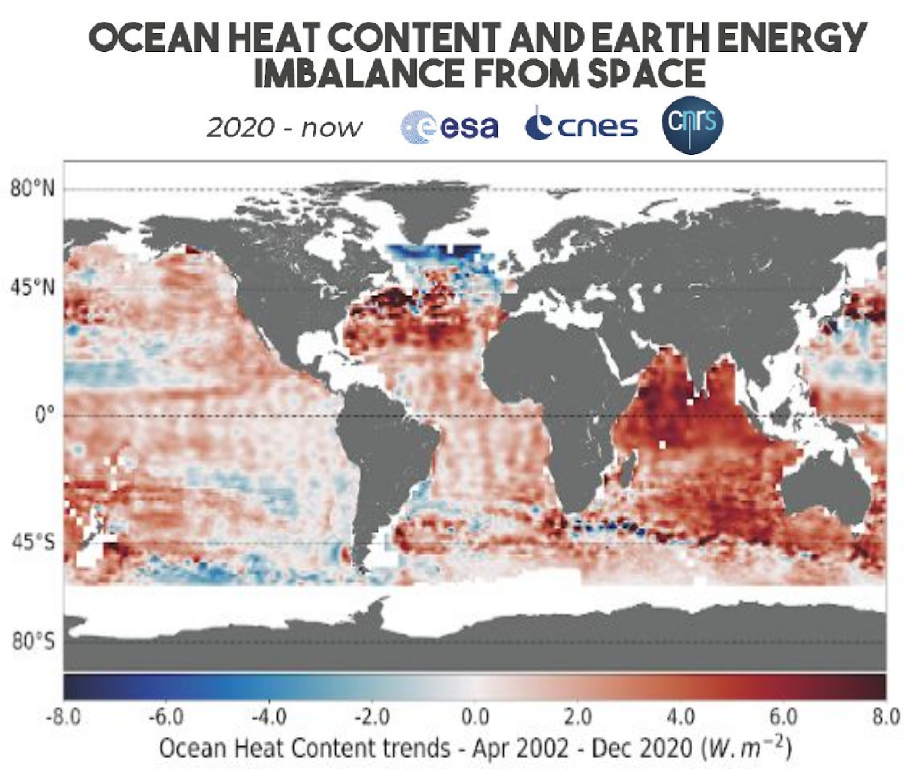
Climate change studies, snow and ice, hydrological modelling, inland water quality, segmentation and classification by deeplearning, cloud detection, fluorescence observation … the fields of application are countless!